Preliminary Design for Trajectory Prediction
Our approach uses a graph to represent the interactions of close objects, applies several graph convolutional blocks to extract features, and subsequently uses an encoder-decoder long short-term memory (LSTM) model to make predictions. The experimental results on two well-known public datasets show that our proposed model improves the prediction accuracy of the state-of-the-art solution by 30%. Our prediction error is 1 m shorter than an existing scheme and it runs 5x faster than the state of the art schemes.
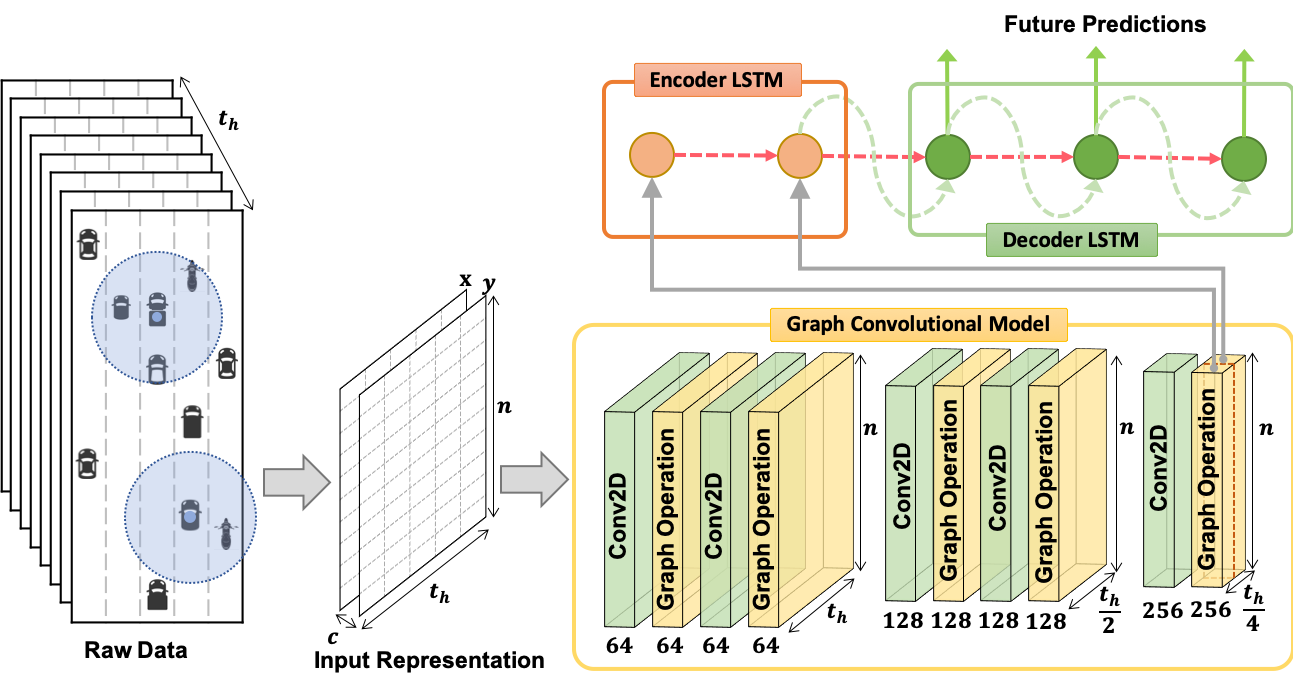
GRIP Trajectory Prediction Scheme
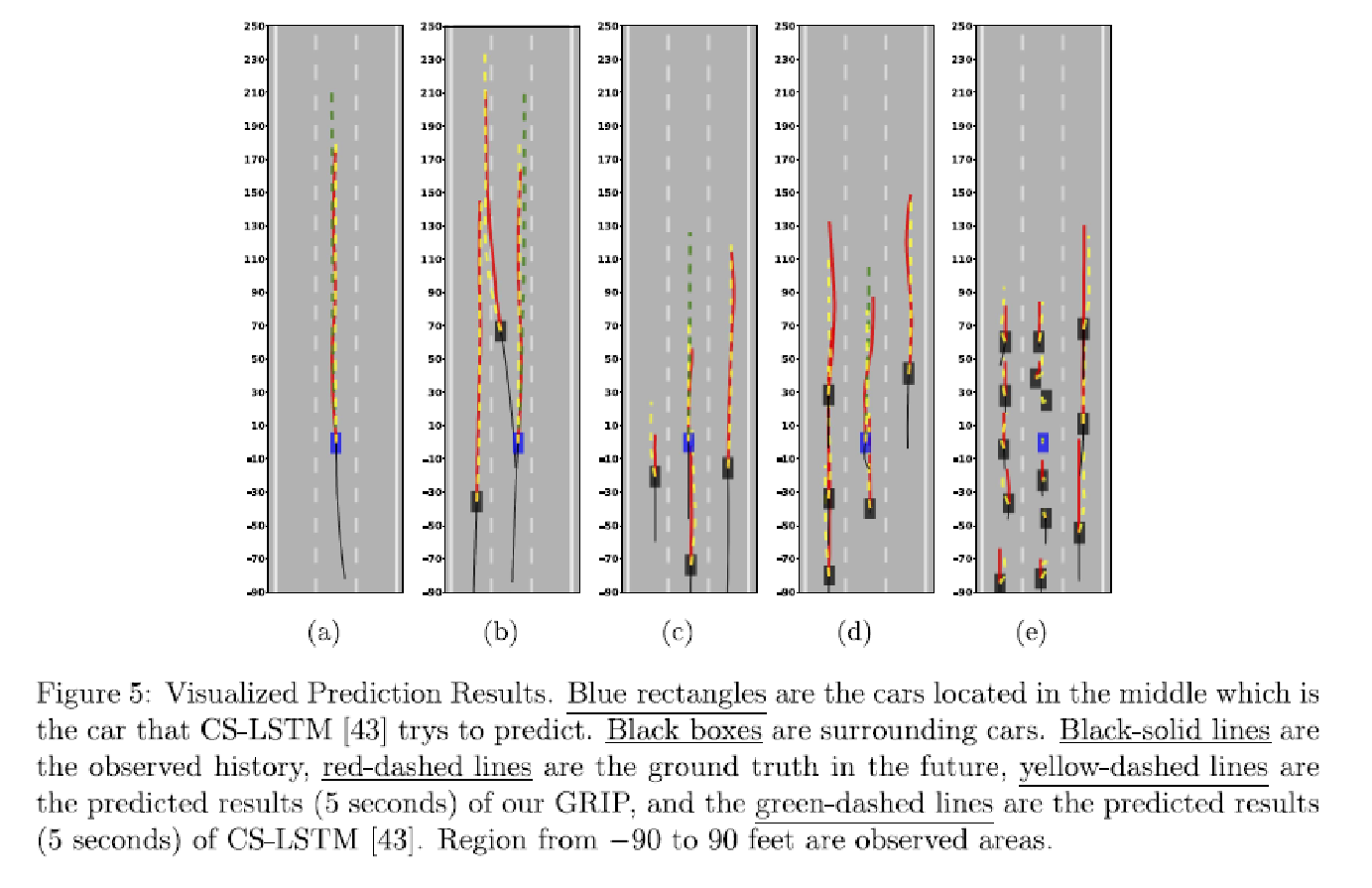
Preliminary Results
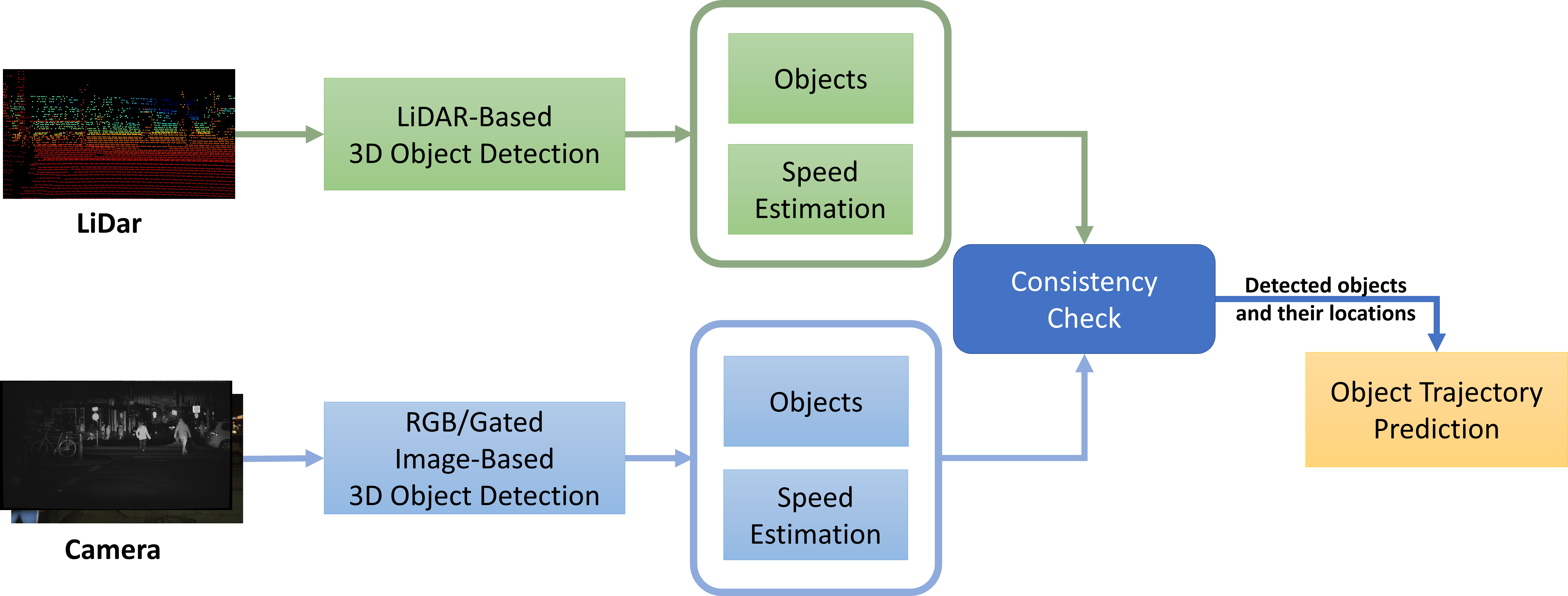
Object Detection & Tracking
Video Instance Segmentation
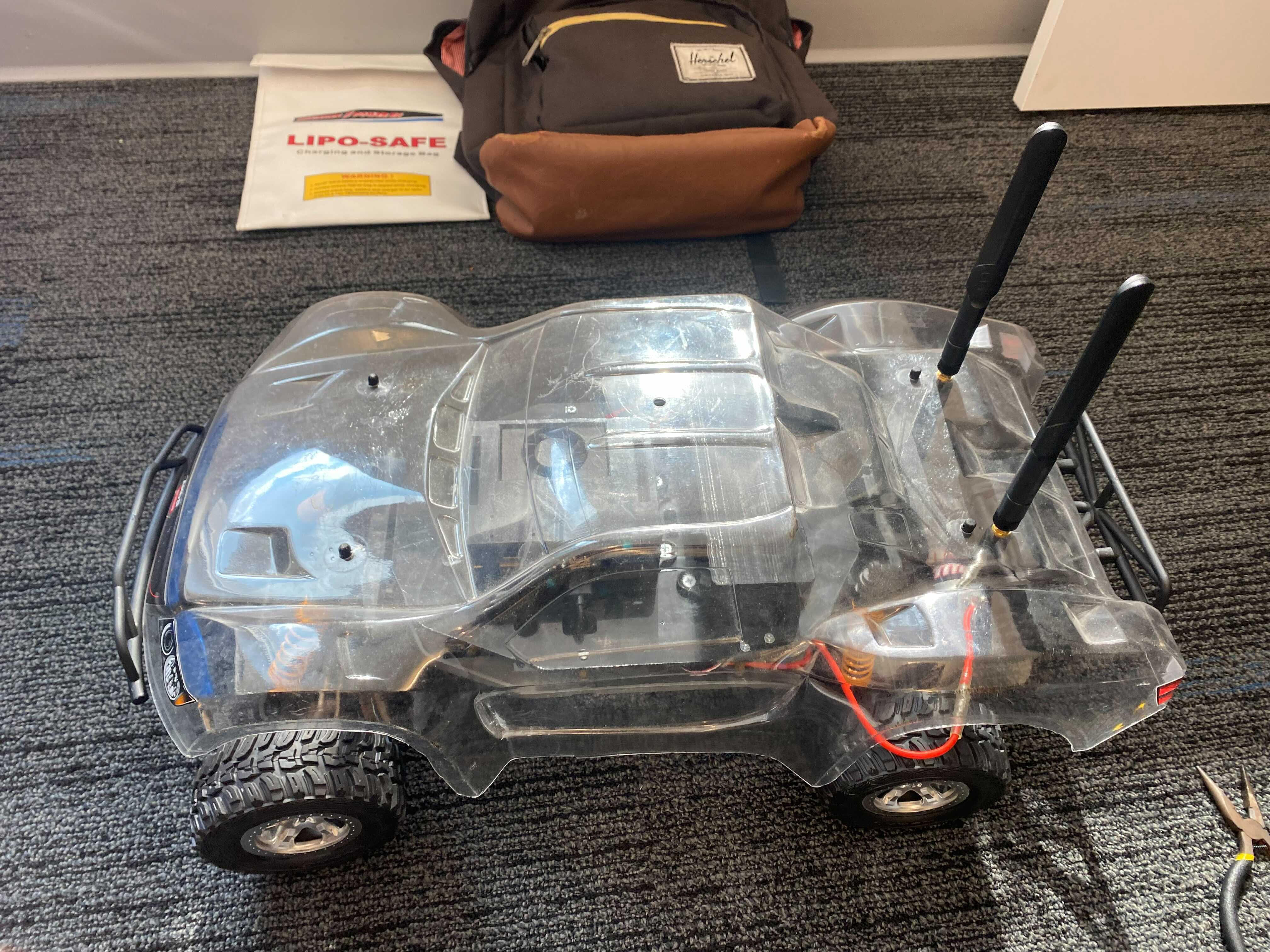
Our robotic car prototype
Autonomous Robotic Car Following
Robotic Car Attack - Object not detected
Quick Links
Sponsors - NSF CPS Grant.
Research - Other On-Going Research.
Publications - Related Publications
People - Team Members